Hi, there! I am
Sandeep Thalapanane
A robotics enthusiast, leveraging expertise in computer vision and machine learning to engineer groundbreaking solutions for tomorrow's autonomous systems. I'm seeking full-time positions in robotics, machine learning, computer vision, and autonomous vehicles, and I am open to relocation.
Let's
Connect
Skills & Experience
Programming Languages
C++
Python
C#
Matlab
Frameworks/Libraries
OpenCV
PyTorch
TensorFlow
Keras
scikit-learn
Pandas
Pytorch3D
Tools
Unity
Docker
ROS 1 & 2
Linux
Grafana
Raspberry Pi
Bash
Microsoft Excel
VS Code
Git
GitHub
Gitlab
Visual Studio
Gazebo
Rviz
Azure Machine learning
AWS Sagemaker

Telos Health
Software Engineer, Machine Learning Intern
- Engineered realistic medical simulations of heart-catheter interactions using the SOFA simulator.

Nethermind
Machine Learning Intern
- Conducted research on diverse imaging setups, including stereo, infrared, wide-angle, & fisheye lenses for palm vein biometrics & integrated infrared dot projection for precise 3D reconstruction.
- Implemented a MobileNet-based segmentation model tailored for palm vein biometrics, significantly improving accuracy & speed.
University of Maryland
Research Associate - Computer vision
- Designed a novel Virtual Reality driving simulator using Unity, SUMO, Matlab RoadRunner, and Meta VR.
- Reduced immersive driving simulator cost by 98.8% to make it accessible for $2,500, enabling cost-effective driving research.
- Leveraged VR simulation to conduct a VR user study of accident scenarios, capturing participant interactions and curating a dataset.
- Achieved enhanced path planning for AVs & and increased safety using UniTraj to predict driving behaviors & vehicle trajectories.
- Employing sim-to-real image translation to the captured interactions by applying the style of the real world to simulated images.
TRC Robotics
Robotics Software Engineer Intern
- Spearheaded the development of a user-friendly Grafana plug-in to control the robot and enhanced it by incorporating ROS lib JavaScript & Node JS for the robot to perform tasks & simulations on a web page, resulting in a 40% reduction in manual task time.
- Architected & customized Docker containers to integrate the Grafana plug-in enhancing user experience & streamlining workflows.

Flextronics
Senior Analyst - Procurement
- Resolved backlog of $3 million worth of purchase orders during COVID critical times by strategically sourcing shipping partners.
- Streamlined coordination and collaboration with customers and suppliers from all parts of the world through swift & constant communication, and achieved inventory target of $1 million.
Education
University of Maryland, College Park, USA
Master of Engineering
August 2022 - May 2024
- Branch: Robotics
- CGPA: 3.97/4
CEG, Anna University, Chennai
Bachelor of Engineering
August 2016 - October 2020
- Branch: Mechanical
- CGPA: 8.09/10
Projects
3D Inspection Using NeuS
Tech Stack
Formulated a 3D NeRF inspection pipeline based on HF-NeuS (SDF) & diffusion-based model for 3D reconstruction of surface and crack segmentation respectively, improved HF-NeuS with two additional losses to reduce training time.
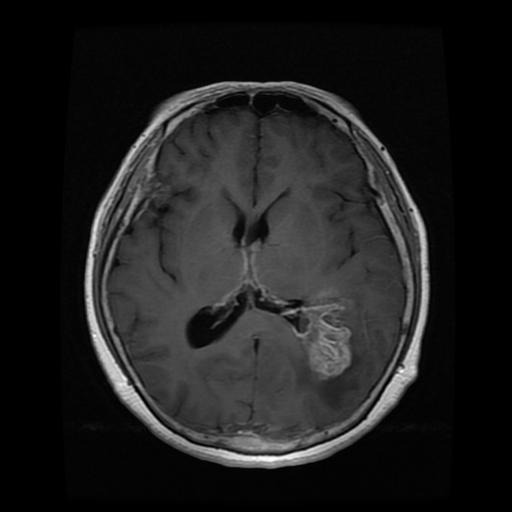
Brain Cancer Dataset Augmentation
Tech Stack
Developed a Generative Adversarial Network (GAN) based AI model to generate synthetic brain cancer images, to expand training datasets, and used Likeness Score with Distance-based Separability Index to assess generated image quality.
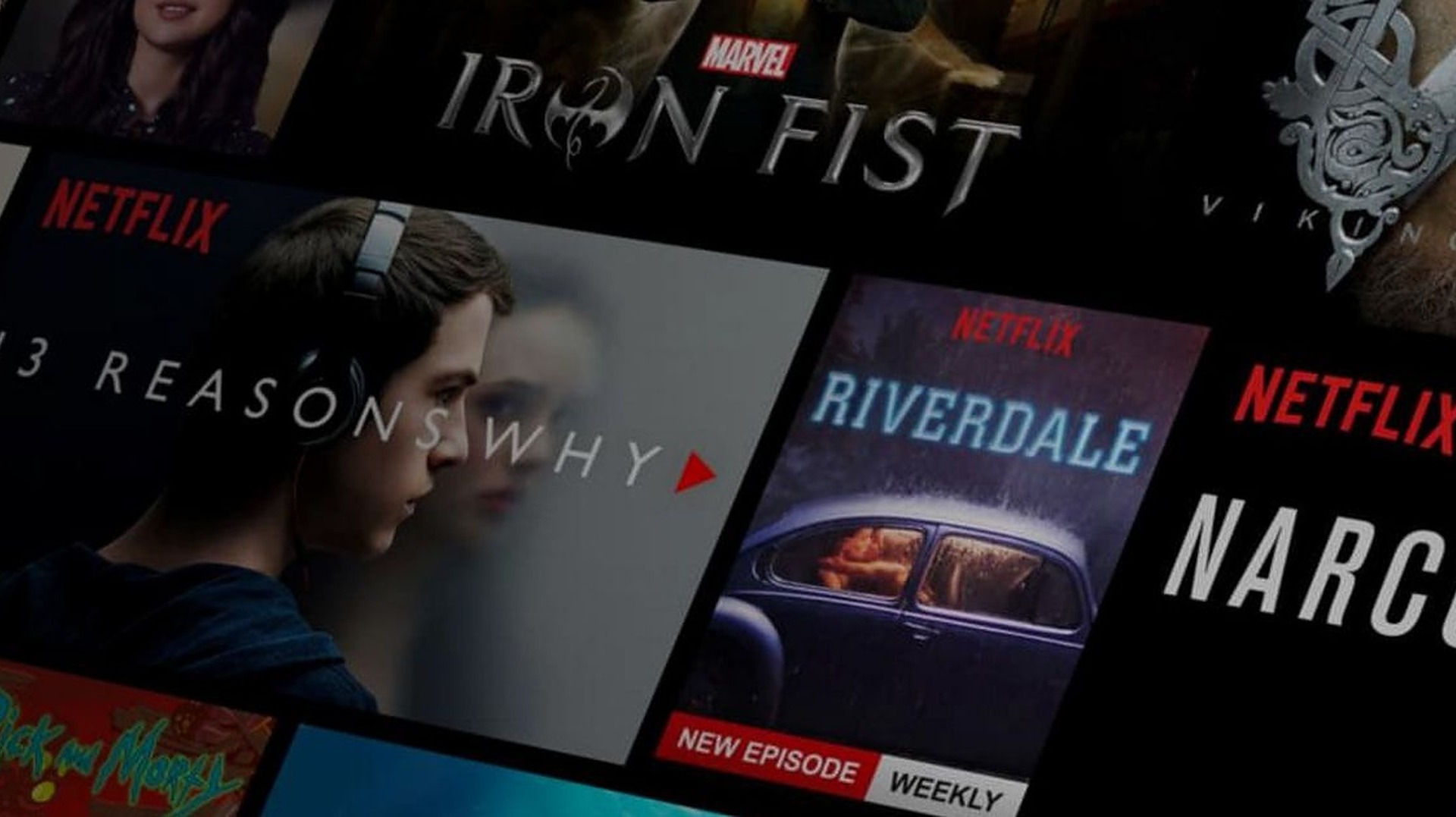
Personalized Movie Recommendation System
Tech Stack
Engineered and deployed a production movie recommender using MLOps & a CI/CD pipeline on AWS. Trained an LLM recommendation model with collaborative & content-based filtering for personalized suggestions.
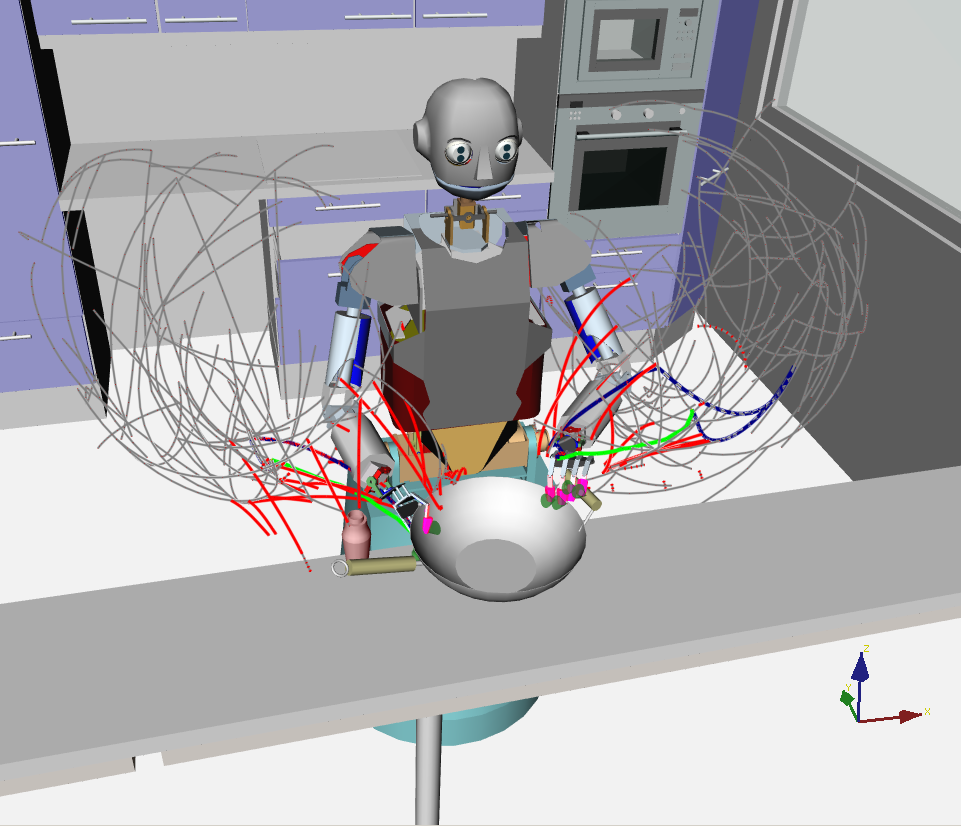
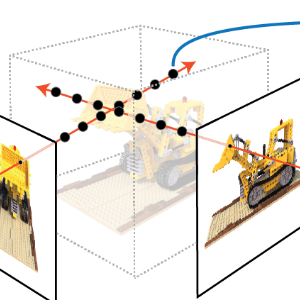
Robot Motion Planning in Learned Latent Spaces
Tech Stack
Implemented Learned Latent Rapidly-Exploring Random Trees to expertly address complex robot motion planning challenges by mapping to a lower-dimensional latent space by using a neural net, resulting in faster solving of high DOF motion planning.
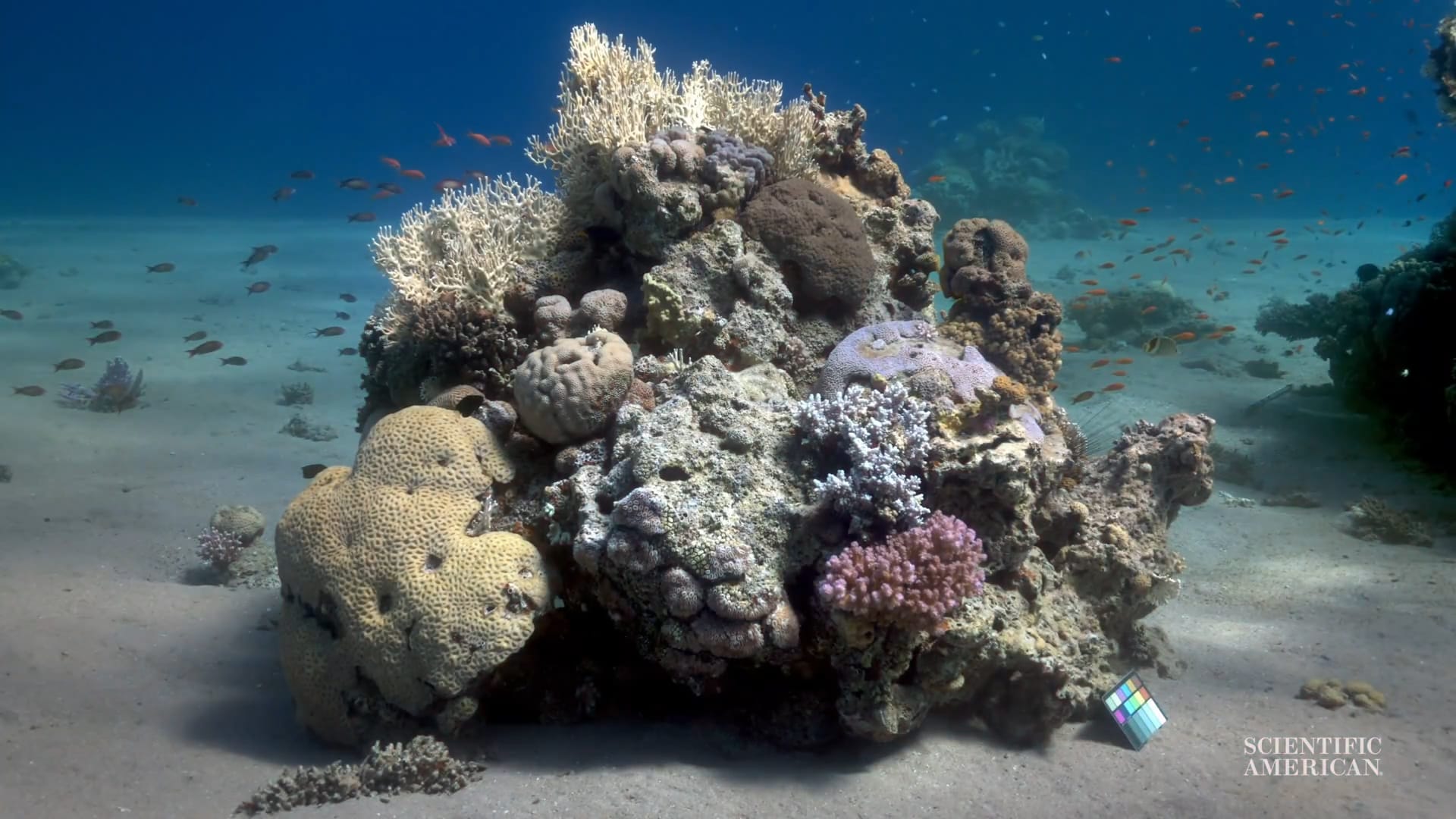
Underwater image restoration
Tech Stack
Enhanced underwater image visibility by restoring true colors using an innovative image processing pipeline. Leveraged a physics based approach and a deep learning neural network model to estimate depth and counteract light scattering caused by water.
Virtual car driving using hand gestures
Tech Stack
Inspired by NVIDIA’s virtual driving initiative, constructed a remote-controlled automotive system by training a machine learning model & translating hand gestures into driving commands for a robot
Turtle Bot Path planning using A*
Tech Stack
Deployed A* algorithm, SLAM, and object detection into the TurtleBot using camera and lidar sensor and leveraging the ROS2 framework, Gazebo, and RViz to simulate robot movement in dynamic environments efficiently.
Wall following Algorithm
Tech Stack
Devised wall-following algorithms to autonomously guide robots through complex mazes, ensuring continuous navigation.

High-speed camera mobile manipulator
Tech Stack
Engineered a High-speed camera robot arm model and formulated the Kinematics & dynamics of the robot links & created a ROS package & simulated in a custom-designed Gazebo environment & visualized the camera attached at the end effector using RViz.
Research Experience
Multiscale Measurements lab - UMD
Research Assistant
Aug 2023 - Present
- Executed 3D digital image correlation for stress analysis by doing 3D reconstruction using a single camera and robot arm.
- Pioneered a synthetic dataset through mathematical deformation, enabling the training of an ML model for DIC strain analysis.